上QQ阅读APP看书,第一时间看更新
1.2 问题分类
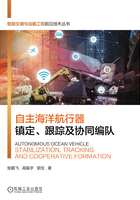
完整的AMV系统结构(位置与方向)可描述为六个独立坐标或称六自由度(Degree Of Freedom, DOF),包括纵向、横漂、垂荡、横摇、纵摇、艏摇,如图1-1所示。在研究中,多数情况下,垂荡、纵摇、横摇为开环稳定,把六自由度问题简化为对纵向、横漂、艏摇三自由度的控制。

图1-1 六自由度海洋航行器
根据海洋航行器作业特点[19-21],可将其分为:镇定(Stabilization)、轨迹跟踪(Trajectory tracking)、路径跟随(Path following)和编队(Formation)。

图1-2 镇定
如图1-2所示,镇定控制是指系统同时考虑动力定位和姿态保持,其目标为使系统从任意初始状态,到达期望点并稳定在期望状态[36,37]。
如图1-3所示,轨迹跟踪可以描述为在任意给定的初始条件下,轨迹跟踪控制器驱动海洋航行器到达并跟随三维空间中一条预先规划好的轨迹(关于时间足够光滑的函数)。轨迹跟踪问题既要求满足空间约束又同时要求满足时间约束,是空间任务与时间任务的交集[22-28]。

图1-3 轨迹跟踪
如图1-4所示,协同编队控制是指,采用合适的策略描述编队构型,通过多AMV间局部相互作用(通信、合作、竞争),设计所需的控制,驱使个体按照预先设定的编队构型运动,并要求在运动过程中,多个体具有避碰及避障功能。

图1-4 协同编队