RC receiver
Although we could just control the whole thing with our computer (using the telemetry module and a joystick), we prefer a traditional tactile controller. Plus, it's always a good idea to have more than one method of control.
Pixhawk works with several different types of controller standards (Futaba, Spektrum/JR, even a simple receiver with inpidual outputs for every channel of control). We're going to use the Spektrum standard.
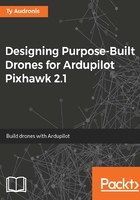
There is a plug just for Spektrum (satellite receivers) on the top of the Pixhawk. There are also plugs for Futaba standards. It works pretty much the same. Luckily, the Spektrum and Futaba controllers have a standardized plug, so no soldering is necessary. Just plug the receiver into the SPKT port and place the receiver. We put ours on the very front of the rover (just in front of the GPS antenna) as shown in the following image:
