2.4.2 电缆线连接
机器人系统之间的电缆线连接分2类:系统内部的电缆线连接和系统外围的电缆线连接。
 系统内部的电缆线连接 主要分3种情况:机器人本体与控制器的连接、示教器与控制器的连接、客户电源与控制器的连接。必须将这些电缆线连接完成,才可以实现机器人的基本运动。
系统内部的电缆线连接 主要分3种情况:机器人本体与控制器的连接、示教器与控制器的连接、客户电源与控制器的连接。必须将这些电缆线连接完成,才可以实现机器人的基本运动。
系统外围的电缆线连接 主要指机器人本体与末端执行器的连接,用以实现机器人的具体作业功能。
(1)系统内部的电缆线连接
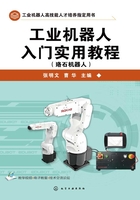
①机器人本体与控制器的连接 机器人本体与控制器之间的连接电缆只有一根,即中继电缆,包括动力线和编码器线,两端分别连接至机器人本体的重载插头和控制器的重载插头,如图2-18所示。

图2-18 机器人本体与控制器连接图示
控制器与机器人连接电缆的重载连接器内部的插针具有一定的活动裕量,因此连接重载连接器插头时动作要轻柔,遇到阻力时应检查插针有无歪斜情况,如有则需纠正后再进行连接,以免损坏重载插针。
②示教器与控制器的连接 示教器电缆线为红色线,一端已连接至示教器;另一端接口需对准控制器面板上的示教器接口卡槽插入,并将其固定好,如图2-19所示。

图2-19 示教器与控制器连接图示
③客户电源与控制器的连接 客户电源电缆为XBC控制器出厂时附带的电缆,包括两根黑色的AC电源线和一根黄绿色的保护地线,用来将控制器连接到220V/50Hz的电源上,如图2-20所示。但需自制AC电源插头,并根据表2-6进行接线,其中AC电源电缆中黄绿色的地线需连接到配电系统的接地端子上。

图2-20 外部电源电缆
表2-6 AC电源接头定义

电气连接确认无误后,使用控制器上的主电源开关来启动系统。若一切正常,系统在启动完毕后将在示教器上显示欢迎界面,用户可对机器人进行配置或者编程。
(2)系统外部的电缆线连接
系统内部的电气连接确认无误后,需要对机器人末端执行器上的信号及气路进行连接。
机器人本体与末端执行器(工具)之间的电缆线连接接口及气路分布如图2-21所示。

图2-21 ROKAE机器人本体与末端执行器
I/O接口 通过该接口把机器人末端执行器上的信号连接到控制器。
气源接口 通过集成气源接口将气体传送给气动元件,为4路分开的直通气路。