第四节 导杆机构的力分析
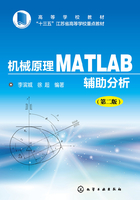
在如图2-8所示的导杆机构中,已知各构件的尺寸和质心的位置、各构件的质量和转动惯量、原动件1的方位角θ1和匀角速度ω1以及构件3的工作阻力矩Mr,求各运动副中的反力和原动件1上的平衡力矩Mb。

图2-8 导杆机构受力分析
一、数学模型的建立
1.惯性力和惯性力矩的计算
由第一章介绍的运动分析方法可求出导杆机构各构件的位移、速度和加速度,并可进一步计算出各构件质心的加速度。
构件1质心S1的加速度
 (2-20)
(2-20)
构件3质心S3的加速度
 (2-21)
(2-21)
由构件质心的加速度和构件的角加速度可以确定其惯性力和惯性力矩
 (2-22)
(2-22)
2.平衡方程的建立
导杆机构有4个低副,每个运动副受杆的作用分别有x、y方向的两个分力,另外还有一个待求的平衡力矩共9个未知量,需列出九个方程式求解。
如图2-8所示,对构件1进行受力分析,构件1受惯性力、构件2和构件4对它的作用力以及平衡力矩。对其质心S1点取矩,根据∑ =0、∑Fx=0和∑Fy=0,写出如下平衡方程
=0、∑Fx=0和∑Fy=0,写出如下平衡方程
 (2-23)
(2-23)
同理,对构件2进行受力分析,根据∑Fx=0和∑Fy=0,写出如下平衡方程
 (2-24)
(2-24)
这里强调一点,对滑块2,根据几何约束条件,可以列出下列方程作为补充方程
 (2-25)
(2-25)
同理,对构件3进行受力分析,对其质心S3点取矩,根据∑ =0、∑Fx=0和∑Fy=0,写出如下平衡方程
=0、∑Fx=0和∑Fy=0,写出如下平衡方程
 (2-26)
(2-26)
根据以上九个方程式可以解出各运动副反力和平衡力矩等九个未知量,由于以上九个方程式都为线性方程,为便于MATLAB编程求解,将以上线性方程组合写成矩阵形式的平衡方程
 (2-27)
(2-27)
式中,C为系数矩阵;FR为未知力列阵;D为已知力列阵。其中



二、计算实例
【例2-3】 在图2-8所示的导杆机构中,已知:lAB=400mm,lAC=1000mm,lCD=1600mm,杆AB的质心在A点,质量m1=1.2kg,构件3的质心在中点S3,质量m3=10kg,绕点S3的转动惯量 =2.2kg·m2,工作时构件3受到的工作阻力矩Mr=100N·m,急回行程时不受阻力,构件1绕A轴以ω1=10rad/s逆时针匀速转动,要求对该机构进行动态静力分析,求构件1上应加的平衡力矩和各运动副反力。
=2.2kg·m2,工作时构件3受到的工作阻力矩Mr=100N·m,急回行程时不受阻力,构件1绕A轴以ω1=10rad/s逆时针匀速转动,要求对该机构进行动态静力分析,求构件1上应加的平衡力矩和各运动副反力。
三、程序设计
导杆机构力分析程序leader_force文件
********************************************************
%1.输入已知数据
clear;
l1=0.4;
l3=1.6;
l4=1
omega1=10;
hd=pi/180;
du=180/pi;
J3=2.2;
G3=98; G1=1.2*9.8;
g=9.8;
Mr=100;
m3=G3/g; m1=G1/g;
%2.导杆机构运动分析
%………………… 计算构件的位移及角位移…………………………………
for n1=1∶400;
theta1(n1)=n1*hd;
s3(n1)=sqrt((l1*cos(theta1(n1)))*(l1*cos(theta1(n1)))﹢(l4﹢l1*sin(theta1(n1)))*(l4﹢l1*sin(theta1(n1))));
%s3表示滑块2相对于CD杆的位移
theta3(n1)=acos((l1*cos(theta1(n1)))/s3(n1)); %theta3表示杆3转过角度
end
%………………… 计算构件的角速度及速度…………………………
for n1=1:400;
A=[sin(theta3(n1)),s3(n1)*cos(theta3(n1)); %从动件位置参数矩阵
-cos(theta3(n1)),s3(n1)*sin(theta3(n1))];
B=[l1*cos(theta1(n1));l1*sin(theta1(n1))]; %原动件位置参数矩阵
omega=A\(omega1*B);
v2(n1)=omega(1); %滑块2的速度
omega3(n1)=omega(2); %构件3的角速度
%………………………… 计算构件的角加速度及加速度 …………………………
A=[sin(theta3(n1)),s3(n1)*cos(theta3(n1)); %从动件位置参数矩阵
cos(theta3(n1)),-s3(n1)*sin(theta3(n1))];
At=[omega3(n1)*cos(theta3(n1)),(v2(n1)*cos(theta3(n1))-s3(n1)*omega3(n1)*sin(theta3(n1)));
-omega3(n1)*sin(theta3(n1)),(-v2(n1)*sin(theta3(n1))-s3(n1)*omega3(n1)*cos(theta3(n1)))];
Bt=[-l1*omega1*sin(theta1(n1));-l1*omega1*cos(theta1(n1))];
alpha=A\(-At*omega﹢omega1*Bt); %机构从动件的加速度列阵
a2(n1)=alpha(1); %a2表示滑块2的加速度
alpha3(n1)=alpha(2); %alpha3表示杆3的角加速度
end
%3.导杆机构力平衡计算
for n1=1:400;
% 计算各个铰链点坐标
xa=0;
ya=l4;
xb(n1)=l1*cos(theta1(n1));
yb(n1)=l4﹢l1*sin(theta1(n1));
xc=0;
yc=0;
% 计算各个质心点坐标
xs3(n1)=l3*cos(theta3(n1))/2;
ys3(n1)=l3*sin(theta3(n1))/2;
% 计算各个质心点加速度
a3x(n1)=-l3*(alpha3(n1)*sin(theta3(n1))﹢omega3(n1)∧2*cos(theta3(n1)))/2;
a3y(n1)=l3*(alpha3(n1)*cos(theta3(n1))-omega3(n1)∧2*sin(theta3(n1)))/2;
% 计算各构件惯性力和惯性力矩
F3x(n1)=-m3*a3x(n1); F3y(n1)=-m3*a3y(n1);% 计算惯性力
Mf3(n1)=-J3*alpha3(n1); % 计算惯性力矩
% 未知力系数矩阵
C=zeros(9);
C(1,1)=-1; C(1,3)=-1;
C(2,2)=-1; C(2,4)=-1;
C(3,3)=yb(n1)-ya; C(3,4)=xa-xb(n1); C(3,9)=1
C(4,3)=1; C(4,5)=-1;
C(5,4)=1; C(5,6)=-1;
C(6,5)=cos(theta3(n1)); C(6,6)=sin(theta3(n1));
C(7,5)=1; C(7,7)=-1;
C(8,6)=1; C(8,8)=-1;
C(9,5)=ys3(n1)-yb(n1); C(9,6)=xb(n1)-xs3(n1);
C(9,7)=-(ys3(n1)-yc); C(9,8)=-(xc-xs3(n1)); C(9,9)=0;
% 已知力列阵
D=[0;G1;0;0;0;0;-F3x(n1);-F3y(n1)﹢G3;Mr-Mf3(n1)];
% 求未知力列阵
FR=inv(C)*D;
Fr14x(n1)=FR(1);
Fr14y(n1)=FR(2);
Fr12x(n1)=FR(3);
Fr12y(n1)=FR(4);
Fr23x(n1)=FR(5);
Fr23y(n1)=FR(6);
Fr34x(n1)=FR(7);
Fr34y(n1)=FR(8);
Mb(n1)=FR(9);
end
%4.输出机构的力分析线图
figure(1);
n1=1:400;
subplot(2,2,1); %绘运动副反力FR12 曲线图
plot(n1, Fr12x,'b');
hold on
plot(n1,Fr12y,'k');
legend('F_R_1_2_x','F_R_1_2_y')
title('运动副反力F_R_1_2曲线图');
xlabel('曲柄转角 \theta_1/\circ')
ylabel('F/N')
grid on;
subplot(2,2,2); %绘运动副反力FR23曲线图
plot(n1,Fr23x(n1),'b');
hold on
plot(n1,Fr23y(n1),'k');
hold on
legend('F_R_2_3_x','F_R_2_3_y')
title('运动副反力F_R_2_3曲线图');
xlabel('曲柄转角 \theta_1/\circ')
ylabel('F/N')
grid on;
subplot(2,2,3); %绘运动副反力FR34曲线图
plot(n1,Fr34x,'b');
hold on
plot(n1,Fr34y,'k');
hold on
legend('F_R_3_4_x','F_R_3_4_y')
title('运动副反力F_R_3_4曲线图');
xlabel('曲柄转角 \theta_1/\circ')
ylabel('F/N')
grid on;
subplot(2,2,4); %绘平衡力矩Mb曲线图
plot(n1,Mb)
title('力矩Mb图')
xlabel('曲柄转角 \theta_1/\circ');
ylabel('M/N.m')
hold on;
grid on;
text(100,1.9*10∧6,'Mb')
四、运算结果
图2-9为导杆机构的力分析线图。


图2-9 导杆机构力分析线图